Menu
-
 Điện - Tự Động hóa
Điện - Tự Động hóa
- Chi tiết danh mục
- Đèn Chiếu Sáng Tủ Điện - Máy
- Đầu Cắm Kết Nối Công Nghiệp
- Dây Dẫn Điện
- Xích Đi Dây Điện
- Thiết Bị Bôi Trơn - Bảo Dưỡng
- Xy Lanh Điện - Phụ Kiện
- Động Cơ - Servo
- Motor Bơm Nước - Hóa Chất
- Nguồn Điện
- Cảm Biến - Công Tắc Công Nghiệp
-
Module - Mạch Điện Công Nghiệp
- Thiết Bị Giải Nhiệt - Sấy Tủ
- Bộ Phát Xung Điều Khiển
- Vật Tư Điện Điều Khiển
- Thiết Bị Đóng - Cắt Điện
- Biến Tần - Điều Chỉnh Tốc
- PLC - HMI
-
Cơ Khí - Tự Động Hóa
-
Vật Tư Khí Nén
-
Vỏ Tủ - Vật Tư Làm Tủ Điện
-
Khung Định Hình - Băng Tải
- Chi tiết danh mục
-
Khung Định Hình Tròn
-
Khung Định Hình Vuông
-
Khung Nhôm Định Hình
-
Khung Nhôm Mặt Bàn
-
Tán - Nut Nhôm Định Hình
-
Ke Góc Nhôm Định Hình
-
Đế Tấm Nhôm Định Hình
-
Chân Đế - Tăng Chỉnh
-
Bánh Xe Nhôm Định Hình
-
Nắp Che Đầu Nhôm Định Hình
-
Ron Che Rãnh Nhôm Định Hình
-
Băng Tải - Linh Kiện
-
Tay Siết - Núm Vặn
-
Lưới - Hàng Rào Bảo Vệ
-
Linh Kiện Siết - Nối
-
Dao Cụ Cắt Gọt
-
Dụng Cụ Cầm Tay
-
Máy Công Cụ
-
MKZ - Maker Zone | Thiết Bị Học - Training
- Chi tiết danh mục
- Robotic Frames
- Mạch Lập Trình
-
Module - Mạch Cảm Biến
- Combo Cảm Biến
- Cảm Biến Vân Tay
- Cảm Biến Áp Suất
- Cảm Biến La bàn
- Cảm Biến Gyro - Gia Tốc
- Cảm Biến Độ Ẩm - Nhiệt Độ
- Cảm Biến Nước - Mưa
- Cảm Biến Ánh Sáng
- Cảm Biến Âm Thanh
- Cảm Biến Touch
- Cảm Biến Trọng Lượng
- Cảm Biến Lưu Lượng
- Cảm Biến Từ - Kim Loại
- Cảm Biến Đếm - Encoder
- Cảm Biến Vị Trí - Định Vị
- Cảm Biến Khí - Môi Trường
- Cảm Biến Điện Áp - Dòng Điện
- Cảm Biến Chuyển Động - Rung
- Cảm Biến Khoảng Cách - Vật Cản
-
Module - Mạch Điện Tử
- LCD Màn Hình Hiển Thị
- LED - Matrix Hiển Thị
- Đồng Hồ Đo - Hiển Thị
- Mạch Nguồn - Điều Chỉnh
- Mạch Relay - Đóng Ngắt
- Mạch Điều Khiển Động Cơ
- Mạch Nạp Dữ Liệu Chip
- Mạch Truyền - Nhận Dữ Liệu
- Mạch Chuyển Đổi Dữ Liệu
- Truyền Nhận - Âm Thanh
- Phím Bấm - Keypads
- Van Điện - Công Tắc Điện
- Mạch Đệm - Cách Ly Tín Hiệu
- Mạch Khuếch Đại Tín Hiệu
- Dụng Cụ Hàn Cell - Đóng Pin
- Dụng Cụ - Phụ Kiện DIY
- Thiết Bị STEM
- Thiết Bị - Nội Thất Maker Place
-
Linh Kiện Chuyên Dụng CNC
-
Linh Kiện Chuyên Dụng Laser
- Chi tiết danh mục
-
Vỏ - Bàn Máy Khắc Laser
-
Nguồn Laser Khắc
-
Thẻ Điều Khiển Laser Khắc
-
Galvo - Scanner Laser Khắc
-
Mở Rộng Và Hội Tụ Tia Laser
-
Ống Kính - Lens Laser Khắc
-
Khung - Bàn Máy Cắt Laser CO2
-
Nguồn Laser Cắt - Khắc CO2
-
Bộ Điều Khiển Máy laser CO2
-
Ống Phóng Laser CO2
-
Gá - Thấu Kính Laser CO2
-
Trục Xoay Khắc Laser
-
Linh Kiện Chuyên Dụng 3D Printer
-
Nguyên Liệu - Vật Liệu
-
Thiết Bị Đo - Kiểm Tra
- Chi tiết danh mục
-
Dưỡng Kiểm Tra
-
Bàn Map - Bàn Kiểm Tra
- Dụng Cụ Đo - Độ Dày
- Dụng Cụ Đo - Chiều Dài
- Dụng Cụ Đo - Góc Nghiêng
-
Dụng Cụ Đo - Khoảng Cách
-
Dụng Cụ Đo - Điện Áp Dòng Điện
-
Dụng Cụ Đo - Trọng Lượng
-
Dụng Cụ Đo - Lực
-
Dụng Cụ Đo - Cường Độ Sáng
-
Dụng Cụ Đo - Tốc Độ
-
Dụng Cụ Đo - Độ Ẩm Nhiệt Độ
-
Dụng Cụ Đo - Chất Lượng Không Khí
- Dụng Cụ Đo - Bề Mặt Vật Liệu
-
Máy Tính - Viễn Thông
-
Thiết Bị - Vật Tư Nhà Xưởng
-
Hóa Chất Vệ Sinh - Dầu - Mỡ
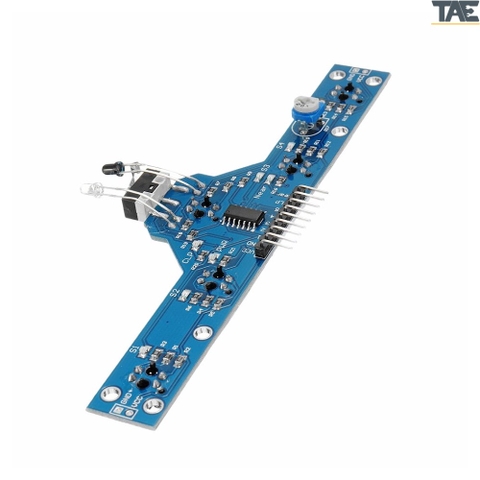
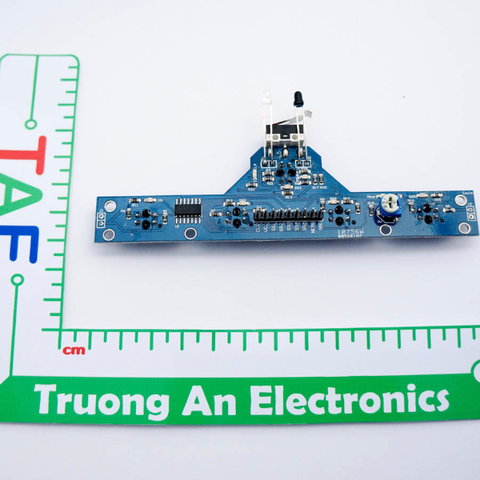
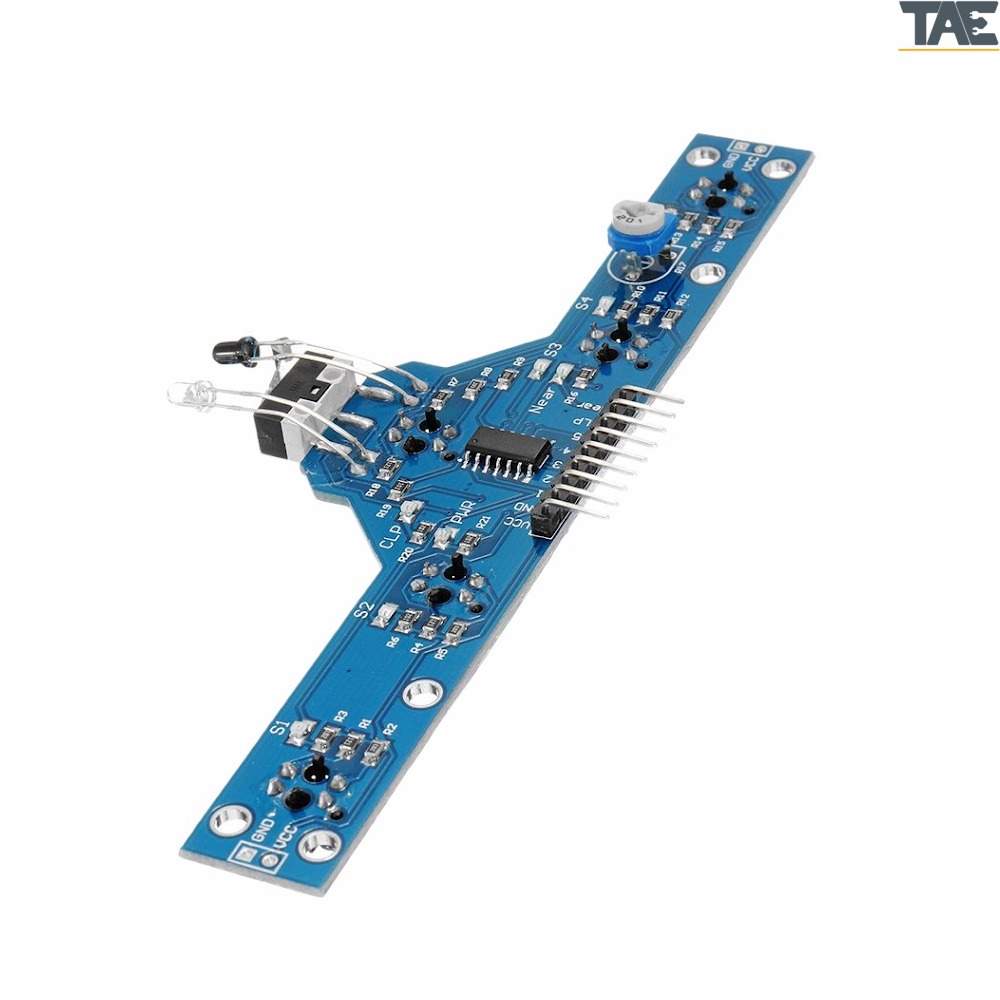
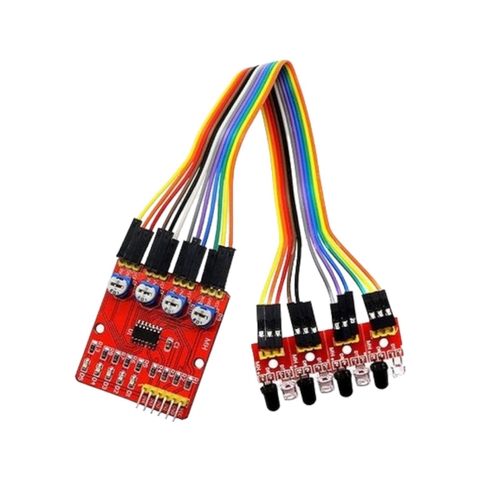
Mạch 5 cảm biến dò line TCRT5000 + tránh vật cản BFD-1000





Tình trạng:
Có sẵn 10 sản phẩm
SKU: 893261100089
Loại: Mạch Điện - Điện Tử
75.000₫
(chưa gồm VAT)
84.750₫
(đã gồm VAT)

Gọi ngay 0833811811 để được tư vấn và hỗ trợ!
Thông Tin Sản Phẩm
Mạch 5 cảm biến dò line TCRT5000 + tránh vật cản BFD-1000 là board rất thường được hay dùng trong các ứng dụng làm robot dò line hay còn được gọi là robot dò đường. Thanh cảm biến có nhiệm vụ dò line để trả tín hiệu về ở dạng tín hiệu mức cao hoặc thấp, ngoài ra thanh dò line còn trang bị cảm biến vật cản để phát hiện có vật cản phía trước tránh robot va chạm với vật thể khác.
THÔNG SỐ KỸ THUẬT:
- Thương Hiệu: OEM
- Kích Thước:128 x 45 x 12mm
- Trọng Lượng: 50g.
- Điện Áp Hoạt Động: 3.3 - 5V.
- Tín Hiệu Vào/Ra: gồm 7 chân tín hiệu cảm biến và 2 chân cấp nguồn
- Chip sử dụng chính: LED TCRT5000
SẢN PHẨM VÀ PHỤ KIỆN GỒM:
- Mạch 5 cảm biến dò line TCRT5000 + tránh vật cản BFD-1000 : 1
SẢN PHẨM KẾT HỢP CẢM BIẾN DÒ LINE
- Khung Robot
SẢN PHẨM TƯƠNG ĐỒNG CẢM BIẾN DÒ LINE
- Module dò line 1 kênh
CHẾ ĐỘ BẢO HÀNH & HỖ TRỢ CẢM BIẾN DÒ LINE
- Kiểm tra trực tiếp tại cửa hàng.
- Đổi trả trong 3 ngày do lỗi nhà sản xuất.
- Hỗ trợ kỹ thuật online.
TÀI LIỆU - HƯỚNG DẪN CẢM BIẾN DÒ LINE
- VCC: nối nguồn 5V
- GND : nối GND
- SS1, SS2: là 2 cảm biến T1 và T2
- S3: là cảm biến ở giữa.
- SS4, SS5: là cảm biến T4 và T5 như hình.
- Near: là ngõ ra của cảm biến hồng ngoại vật cản.
- CLP: là ngõ ra của công tắc hành trình.
GHI CHÚ
- Tài liệu Manual/DataSheet CẢM BIẾN DÒ LINE
- Video Hướng Dẫn CẢM BIẾN DÒ LINE
- Blog bài viết về sản phẩm CẢM BIẾN DÒ LINE
CODE MẪU
- https://create.arduino.cc/editor/changanreview/9aecffaf-b797-4aa3-972b-d8134a99657b/preview
XEM THÊM VIDEO & TẢI TÀI LIỆU TẠI:
- https://tae.vn/mach-5-cam-bien-do-line-tcrt5000-tranh-vat-can-bfd-1000
MUA HÀNG TRÊN SHOPEE:
- https://shopee.vn/product/144259413/2642127541/
TAG CẢM BIẾN DÒ LINE :
- #doline
- #cambiendoline
- #linefollower
- #TCRT5000

Sản Phẩm Liên Quan




-
24%
Cảm Biến Hồng Ngoại Phát Hiện Vật Cản (Dò Line 4 Kênh)
34.000₫
45.000₫



Cảm Biến Siêu Âm Chống Nước AJ-SR04M
150.000₫

Cảm Biến Siêu Âm CW-0006
40.000₫

Cảm Biến Siêu Âm HC-SR04
25.000₫

Cảm Biến Siêu Âm SRF05
30.000₫
