-
 Điện - Tự Động hóa
Điện - Tự Động hóa
- Chi tiết danh mục
- Đèn Chiếu Sáng Tủ Điện - Máy
- Đầu Cắm Kết Nối Công Nghiệp
- Dây Dẫn Điện
- Xích Đi Dây Điện
- Thiết Bị Bôi Trơn - Bảo Dưỡng
- Xy Lanh Điện - Phụ Kiện
- Động Cơ - Servo
- Motor Bơm Nước - Hóa Chất
- Nguồn Điện
- Cảm Biến - Công Tắc Công Nghiệp
-
Module - Mạch Điện Công Nghiệp
- Thiết Bị Giải Nhiệt - Sấy Tủ
- Bộ Phát Xung Điều Khiển
- Vật Tư Điện Điều Khiển
- Thiết Bị Đóng - Cắt Điện
- Biến Tần - Điều Chỉnh Tốc
- PLC - HMI
-
Cơ Khí - Tự Động Hóa
-
Vật Tư Khí Nén
-
Vỏ Tủ - Vật Tư Làm Tủ Điện
-
Khung Định Hình - Băng Tải
- Chi tiết danh mục
-
Khung Định Hình Tròn
-
Khung Định Hình Vuông
-
Khung Nhôm Định Hình
-
Khung Nhôm Mặt Bàn
-
Tán - Nut Nhôm Định Hình
-
Ke Góc Nhôm Định Hình
-
Đế Tấm Nhôm Định Hình
-
Chân Đế - Tăng Chỉnh
-
Bánh Xe Nhôm Định Hình
-
Nắp Che Đầu Nhôm Định Hình
-
Ron Che Rãnh Nhôm Định Hình
-
Băng Tải - Linh Kiện
-
Tay Siết - Núm Vặn
-
Lưới - Hàng Rào Bảo Vệ
-
Linh Kiện Siết - Nối
-
Dao Cụ Cắt Gọt
-
Dụng Cụ Cầm Tay
-
Máy Công Cụ
-
MKZ - Maker Zone | Thiết Bị Học - Training
- Chi tiết danh mục
- Robotic Frames
- Mạch Lập Trình
-
Module - Mạch Cảm Biến
- Combo Cảm Biến
- Cảm Biến Vân Tay
- Cảm Biến Áp Suất
- Cảm Biến La bàn
- Cảm Biến Gyro - Gia Tốc
- Cảm Biến Độ Ẩm - Nhiệt Độ
- Cảm Biến Nước - Mưa
- Cảm Biến Ánh Sáng
- Cảm Biến Âm Thanh
- Cảm Biến Touch
- Cảm Biến Trọng Lượng
- Cảm Biến Lưu Lượng
- Cảm Biến Từ - Kim Loại
- Cảm Biến Đếm - Encoder
- Cảm Biến Vị Trí - Định Vị
- Cảm Biến Khí - Môi Trường
- Cảm Biến Điện Áp - Dòng Điện
- Cảm Biến Chuyển Động - Rung
- Cảm Biến Khoảng Cách - Vật Cản
-
Module - Mạch Điện Tử
- LCD Màn Hình Hiển Thị
- LED - Matrix Hiển Thị
- Đồng Hồ Đo - Hiển Thị
- Mạch Nguồn - Điều Chỉnh
- Mạch Relay - Đóng Ngắt
- Mạch Điều Khiển Động Cơ
- Mạch Nạp Dữ Liệu Chip
- Mạch Truyền - Nhận Dữ Liệu
- Mạch Chuyển Đổi Dữ Liệu
- Truyền Nhận - Âm Thanh
- Phím Bấm - Keypads
- Van Điện - Công Tắc Điện
- Mạch Đệm - Cách Ly Tín Hiệu
- Mạch Khuếch Đại Tín Hiệu
- Dụng Cụ Hàn Cell - Đóng Pin
- Dụng Cụ - Phụ Kiện DIY
- Thiết Bị STEM
- Thiết Bị - Nội Thất Maker Place
-
Linh Kiện Chuyên Dụng CNC
-
Linh Kiện Chuyên Dụng Laser
- Chi tiết danh mục
-
Vỏ - Bàn Máy Khắc Laser
-
Nguồn Laser Khắc
-
Thẻ Điều Khiển Laser Khắc
-
Galvo - Scanner Laser Khắc
-
Mở Rộng Và Hội Tụ Tia Laser
-
Ống Kính - Lens Laser Khắc
-
Khung - Bàn Máy Cắt Laser CO2
-
Nguồn Laser Cắt - Khắc CO2
-
Bộ Điều Khiển Máy laser CO2
-
Ống Phóng Laser CO2
-
Gá - Thấu Kính Laser CO2
-
Trục Xoay Khắc Laser
-
Linh Kiện Chuyên Dụng 3D Printer
-
Nguyên Liệu - Vật Liệu
-
Thiết Bị Đo - Kiểm Tra
- Chi tiết danh mục
-
Dưỡng Kiểm Tra
-
Bàn Map - Bàn Kiểm Tra
- Dụng Cụ Đo - Độ Dày
- Dụng Cụ Đo - Chiều Dài
- Dụng Cụ Đo - Góc Nghiêng
-
Dụng Cụ Đo - Khoảng Cách
-
Dụng Cụ Đo - Điện Áp Dòng Điện
-
Dụng Cụ Đo - Trọng Lượng
-
Dụng Cụ Đo - Lực
-
Dụng Cụ Đo - Cường Độ Sáng
-
Dụng Cụ Đo - Tốc Độ
-
Dụng Cụ Đo - Độ Ẩm Nhiệt Độ
-
Dụng Cụ Đo - Chất Lượng Không Khí
- Dụng Cụ Đo - Bề Mặt Vật Liệu
-
Máy Tính - Viễn Thông
-
Thiết Bị - Vật Tư Nhà Xưởng
-
Hóa Chất Vệ Sinh - Dầu - Mỡ
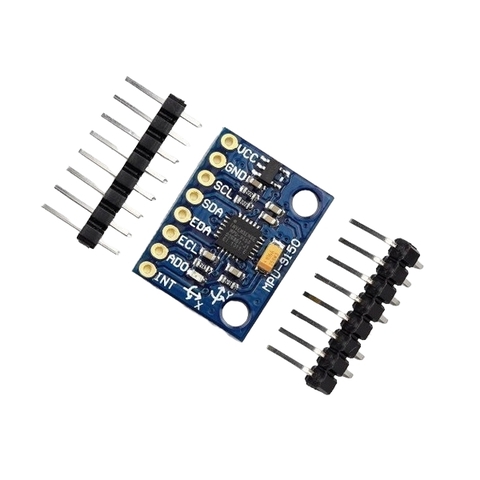
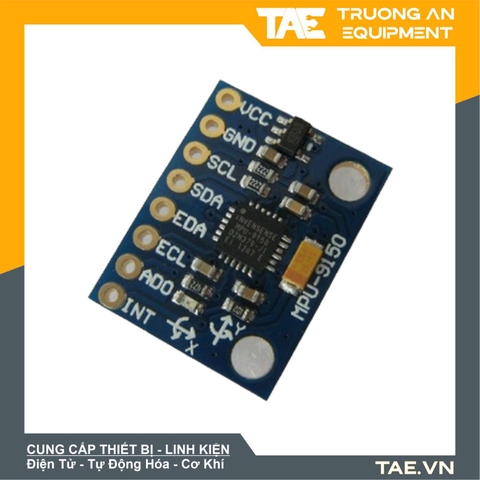
Cảm Biến Gia Tốc MPU9150



Thông Tin Sản Phẩm
Mô tả sản phẩm
Cảm biến gia tốc MPU9150 là một cảm biến đa chức năng có khả năng đo độ lệch góc, gia tốc và từ trường. Nó được sản xuất bởi công ty InvenSense và được sử dụng rộng rãi trong các ứng dụng nhúng và robot.
Cảm biến gia tốc MPU9150 bao gồm một cảm biến gia tốc 3 trục và một cảm biến từ trường 3 trục, được tích hợp với bộ điều khiển xử lý tín hiệu để đọc và xử lý các giá trị đo. MPU9150 cũng được tích hợp với bộ lọc Kalman để giảm thiểu sai số đo lường.
Cảm biến gia tốc MPU9150 có thể hoạt động ở nhiều phạm vi gia tốc khác nhau, từ ±2g đến ±16g. Nó cũng có khả năng đo góc xoay với độ chính xác cao, lên đến 16-bit.
Để sử dụng Cảm biến gia tốc MPU9150, bạn cần một mạch điều khiển như Arduino hoặc Raspberry Pi và một thư viện phần mềm để đọc và xử lý dữ liệu đo từ MPU9150.
Ứng dụng
- Cảm biến gia tốc MPU9150 là cảm biến ứng dụng rất rộng rãi trong các điện thoại di động hiện nay, cảm biến gia tốc MPU9150 có thể đo đến 10 DOF.
- Cảm biến gia tốc MPU9150 thường được sử dụng trong các ứng dụng như quadcopter, robot tự hành, định vị GPS, đo vị trí và đo góc xoay trong không gian 3 chiều.
Thông số kỹ thuật
- Giao thức truyền thông: giao thức chuẩn I2C
- Chip tích hợp 16bit AD chuyển đổi, 16bit dữ liệu đầu ra
- Tầm Gyroscope: ± 250 500 1000 2000 ° / s
- Số trục: 3 trục (x, y, z)
- Phạm vi đo gia tốc: ±2g, ±4g, ±8g, ±16g
- Độ chính xác đo gia tốc: ±0.5%FSR
- Tần số đọc dữ liệu tối đa: 8 kHz
- Độ phân giải: 16-bit
- Phạm vi đo từ trường: ±1200µT
- Độ chính xác đo từ trường: ±0.6%FSR
- Điện áp hoạt động: 2.375 V - 3.46 V
- Dòng tiêu thụ tối đa: 3.9 mA
- Kích thước: 4 x 5 x 0.9 mm
Code tham khảo Cảm biến gia tốc MPU9150 với Arduino
Đầu tiên, bạn cần tải và cài đặt thư viện MPU9150 vào Arduino IDE. Bạn có thể tìm thấy thư viện tại đây: Tải thư viện
Đây là một ví dụ về cách sử dụng cảm biến gia tốc MPU9150 với Arduino. Trong ví dụ này, chúng ta sẽ đọc các giá trị gia tốc và in chúng ra Serial Monitor.
Trong đoạn code trên, chúng ta bắt đầu bằng cách khai báo các thư viện cần thiết, bao gồm Wire.h và SparkFunMPU9150.h. Sau đó, chúng ta khởi tạo đối tượng MPU9150 và cài đặt tốc độ baud rate cho Serial.
Trong hàm setup(), chúng ta bắt đầu bằng cách khởi tạo Wire và MPU9150. Chúng ta kiểm tra kết nối với cảm biến bằng cách gọi hàm testConnection() và in kết quả ra Serial Monitor. Sau đó, chúng ta đặt phạm vi của gia tốc kế của MPU9150 bằng cách gọi hàm setAccelerometerRange().
Trong hàm loop(), chúng ta đọc giá trị gia tốc bằng cách gọi hàm readAccelerometer() và in chúng ra Serial Monitor. Cuối cùng, chúng ta delay 500ms trước khi lặp lại quá trình.
Khi tải code vào Arduino, bạn sẽ thấy các giá trị gia tốc được in ra trên Serial Monitor.
|
#include <Wire.h> MPU9150 mpu; void setup() { Wire.begin(); Serial.println("Testing MPU9150 connections..."); mpu.setAccelerometerRange(MPU9150_RANGE_2G); void loop() { Serial.print("X: "); delay(500); |
TAG
#MPU9150 #accelerometer #motiontracking #sensor #cam_bien #cam_bien_gia_toc #gia_toc #mpu
Video kham khảo

Sản Phẩm Liên Quan

Cảm Biến Gia Tốc 10DOF GY-86
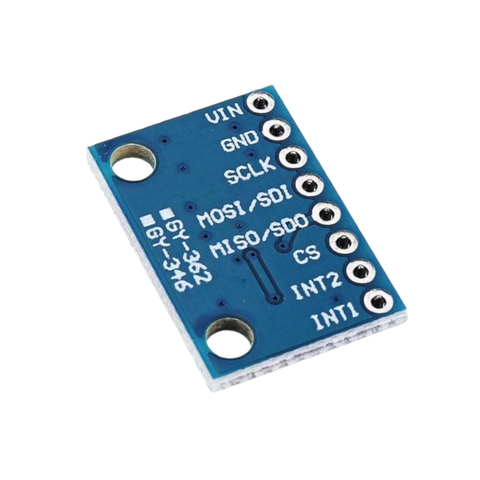
Cảm Biến Gia Tốc GY-362 ADXL362
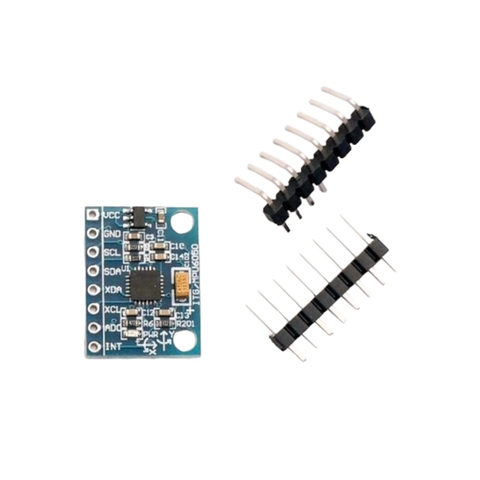
Cảm Biến Gia Tốc MPU6050
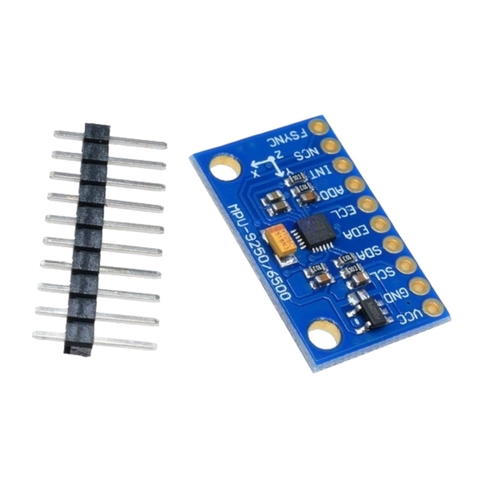
Cảm Biến Gia Tốc MPU9250
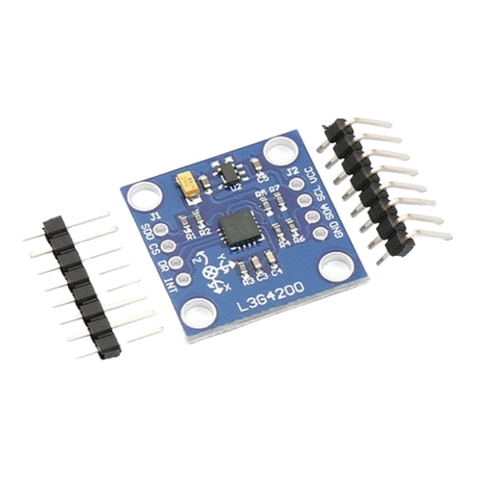
Cảm Biến Gyro L3G4200
